





澳门六合彩【挂牌】 更多»
|
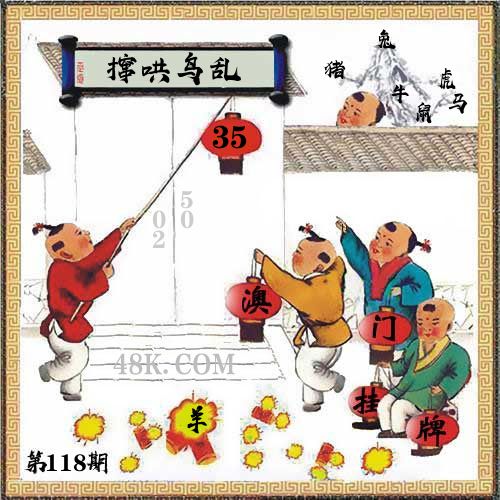
118期 | |
|---|---|---|
| 挂牌 | 35 | |
| 火烧 | 羊 | |
| 横批 | 撺哄鸟乱 | |
| 门数 | 02,05 | |
| 六肖 | 兔猪虎牛马鼠 | |
澳门挂牌解析
2024-118期正版彩图挂:35;挂牌:撺哄鸟乱;六肖:兔猪虎牛马鼠;火烧:羊
解析:【出自】:明·凌濛初《初刻拍案惊奇》第一卷:“众人起初吃酒写合同时,大家撺哄鸟乱,心下还有信有不信的意思。”【示例】:我无法适应这撺哄鸟乱的局面
解释:撺哄:起哄。乱哄哄群鸟飞舞。形容你一言我一语,嘈杂混乱。
综合取肖:牛虎蛇羊猴鸡
解析:【出自】:明·凌濛初《初刻拍案惊奇》第一卷:“众人起初吃酒写合同时,大家撺哄鸟乱,心下还有信有不信的意思。”【示例】:我无法适应这撺哄鸟乱的局面
解释:撺哄:起哄。乱哄哄群鸟飞舞。形容你一言我一语,嘈杂混乱。
综合取肖:牛虎蛇羊猴鸡
【正版澳彩图库】 更多»
澳门管家婆100282.com
『成语平特』
118期
成语爆平特
【马到成功】
开
¥00
准
117期
成语爆平特
【龙行天下】
开
龙25
准
114期
成语爆平特
【虎虎生威】
开
虎39
准
113期
成语爆平特
【狗仗人势】
开
狗19
准
112期
成语爆平特
【马到成功】
开
马35
准
澳门管家婆100282.com
『欲钱解特』
118期:
欲钱解特诗
开:¥00
《蛇鼠虎羊发大财,本期特码出大数》
117期:
欲钱解特诗
开:龙25
《虎羊蛇狗发大财,本期特码出大数》
115期:
欲钱解特诗
开:¥00
《蛇马虎羊发大财,本期特码出小数》
114期:
欲钱解特诗
开:猪18
《兔虎羊猴发大财,本期特码出小数》
112期:
欲钱解特诗
开:狗43
《鼠猪虎羊发大财,本期特码出大数》
澳彩图库心水图片资料专区
澳彩独家高手出版精料
澳彩综合全年资料大全
澳彩资料独家精准四肖
| 118期: ⑨肖 | 鸡牛羊猪龙狗蛇鼠猴 | ????中 |
| 118期: ⑧肖 | 鸡牛羊猪龙狗蛇鼠 | ????中 |
| 118期: ⑦肖 | 鸡牛羊猪龙狗蛇 | ????中 |
| 118期: ⑥肖 | 鸡牛羊猪龙狗 | ????中 |
| 118期: ⑤肖 | 鸡牛羊猪龙 | ????中 |
| 118期: ④肖 | 鸡牛羊猪 | ????中 |
| 117期--长期跟踪,稳赚不赔! | ||
| 117期: ⑨肖 | 狗蛇鼠兔虎猴猪牛龙 | 龙25中 |
| 117期: ⑧肖 | 狗蛇鼠兔虎猴猪牛 | 龙25中 |
| 117期: ⑦肖 | 狗蛇鼠兔虎猴猪 | 龙25中 |
| 117期: ⑥肖 | 狗蛇鼠兔虎猴 | 龙25中 |
| 117期: ⑤肖 | 狗蛇鼠兔虎 | 龙25中 |
| 117期: ④肖 | 狗蛇鼠兔 | 龙25中 |
| 116期--长期跟踪,稳赚不赔! | ||
| 116期: ⑨肖 | 鼠猴蛇兔狗羊虎马龙 | 羊10中 |
| 116期: ⑧肖 | 鼠猴蛇兔狗羊虎马 | 羊10中 |
| 116期: ⑦肖 | 鼠猴蛇兔狗羊虎 | 羊10中 |
| 116期: ⑥肖 | 鼠猴蛇兔狗羊 | 羊10中 |
| 116期: ⑤肖 | 鼠猴蛇兔狗 | 羊10中 |
| 116期: ④肖 | 鼠猴蛇兔 | 羊10中 |
| 115期--长期跟踪,稳赚不赔! | ||
| 115期: ⑨肖 | 牛狗羊虎鼠猴猪龙蛇 | 鼠29中 |
| 115期: ⑧肖 | 牛狗羊虎鼠猴猪龙 | 鼠29中 |
| 115期: ⑦肖 | 牛狗羊虎鼠猴猪 | 鼠29中 |
| 115期: ⑥肖 | 牛狗羊虎鼠猴 | 鼠29中 |
| 115期: ⑤肖 | 牛狗羊虎鼠 | 鼠29中 |
| 115期: ④肖 | 牛狗羊虎 | 鼠29中 |
| 114期--长期跟踪,稳赚不赔! | ||
| 114期: ⑨肖 | 蛇羊鸡猴龙牛马鼠猪 | 猪18中 |
| 114期: ⑧肖 | 蛇羊鸡猴龙牛马鼠 | 猪18中 |
| 114期: ⑦肖 | 蛇羊鸡猴龙牛马 | 猪18中 |
| 114期: ⑥肖 | 蛇羊鸡猴龙牛 | 猪18中 |
| 114期: ⑤肖 | 蛇羊鸡猴龙 | 猪18中 |
| 114期: ④肖 | 蛇羊鸡猴 | 猪18中 |
| 113期--长期跟踪,稳赚不赔! | ||
| 113期: ⑨肖 | 蛇鸡马兔牛羊狗猪虎 | 蛇24中 |
| 113期: ⑧肖 | 蛇鸡马兔牛羊狗猪 | 蛇24中 |
| 113期: ⑦肖 | 蛇鸡马兔牛羊狗 | 蛇24中 |
| 113期: ⑥肖 | 蛇鸡马兔牛羊 | 蛇24中 |
| 113期: ⑤肖 | 蛇鸡马兔牛 | 蛇24中 |
| 113期: ④肖 | 蛇鸡马兔 | 蛇24中 |
| 112期--长期跟踪,稳赚不赔! | ||
| 112期: ⑨肖 | 龙牛蛇猴鼠兔虎狗马 | 狗43中 |
| 112期: ⑧肖 | 龙牛蛇猴鼠兔虎狗 | 狗43中 |
| 112期: ⑦肖 | 龙牛蛇猴鼠兔虎 | 狗43中 |
| 112期: ⑥肖 | 龙牛蛇猴鼠兔 | 狗43中 |
| 112期: ⑤肖 | 龙牛蛇猴鼠 | 狗43中 |
| 112期: ④肖 | 龙牛蛇猴 | 狗43中 |
| 111期--长期跟踪,稳赚不赔! | ||
| 111期: ⑨肖 | 羊兔龙马蛇猴猪牛狗 | 狗43中 |
| 111期: ⑧肖 | 羊兔龙马蛇猴猪牛 | 狗43中 |
| 111期: ⑦肖 | 羊兔龙马蛇猴猪 | 狗43中 |
| 111期: ⑥肖 | 羊兔龙马蛇猴 | 狗43中 |
| 111期: ⑤肖 | 羊兔龙马蛇 | 狗43中 |
| 111期: ④肖 | 羊兔龙马 | 狗43中 |
| 110期--长期跟踪,稳赚不赔! | ||
| 110期: ⑨肖 | 羊牛猴猪鼠虎蛇龙鸡 | 蛇48中 |
| 110期: ⑧肖 | 羊牛猴猪鼠虎蛇龙 | 蛇48中 |
| 110期: ⑦肖 | 羊牛猴猪鼠虎蛇 | 蛇48中 |
| 110期: ⑥肖 | 羊牛猴猪鼠虎 | 蛇48中 |
| 110期: ⑤肖 | 羊牛猴猪鼠 | 蛇48中 |
| 110期: ④肖 | 羊牛猴猪 | 蛇48中 |
| 109期--长期跟踪,稳赚不赔! | ||
| 109期: ⑨肖 | 猪鼠猴羊虎龙鸡牛狗 | 狗43中 |
| 109期: ⑧肖 | 猪鼠猴羊虎龙鸡牛 | 狗43中 |
| 109期: ⑦肖 | 猪鼠猴羊虎龙鸡 | 狗43中 |
| 109期: ⑥肖 | 猪鼠猴羊虎龙 | 狗43中 |
| 109期: ⑤肖 | 猪鼠猴羊虎 | 狗43中 |
| 109期: ④肖 | 猪鼠猴羊 | 狗43中 |